最近刚看完freescale mma8451的驱动,并且一直了驱动,自己也没怎么改代码,不过读了一下代码,还是有点体会的,下面我就来分析一下。
首先看下代码结构,有兴趣的可以从一下方式获得代码,git@github.com:zhangjie201412/WorkSpace.git ,最好是先发mail给我,
jay@jay:~/mygit$ tree
.
└── kernel
├── arch
│ └── arm
│ └── mach-mx5
│ └── mx53_smd.c
├── drivers
│ └── hwmon
│ └── mma845x
│ ├── Makefile
│ ├── mma845x.c
│ ├── mma845x.h
│ ├── mma_char.c
│ ├── mma_core.c
│ ├── mma_input.c
│ ├── mma_regs.h
│ ├── mma_sysfs.c
│ └── mma_sysfs.h
└── include
└── linux
└── mma845x.h
其中一个头文件,然后是一个驱动包,里面内容蛮丰富的,还有就是要在板级文件里面注册platform的device端,我这里是基于iMX53的Android BSP
首先咱还是来找源头吧,找啊找,看名字就知道我们先要分析这个mma_core.c文件
这个初始化和卸载模块就不多说了,注册了i2c类型的驱动,接着去platform文件中找注册的device端,mx53_smd.c
这里,填充了mma845x驱动的一些platform_data
然后是注册,
这个函数会把i2c0上的所有驱动都挂到platform driver的device上去,进行匹配,这里我要提示的一点是,这里的2根GPIO 中断引脚,我们要设置为input
接下来分析mma_core.c中的probe函数,这里是最终要的一个函数了
注释也写的蛮清楚的但是咱还是一起来看一下
这里是由probe函数传进来的client参数来得到platform_data,就是我们在板级文件中填充的那些个结构体,我觉得Linux设计的这个platform架构的驱动很好,他可以很好的把驱动和设备隔离开来,虽然有的时候还是会联系到一起,但是对于可移植性更强了,因为,驱动只是对设备的统一管理,而platform device端只需要配置cpu的gpio跟deivce的连接情况,还有一些soc中继承的功能的配置以及注册。
接着这里是给我们驱动中定义的mxc_mma_device_t结构体分配内存,然后是一些kernel info的打印没什么好说了。
还是先来看一下这个结构体吧,
这个结构体比较简单,定义了2个中断号,还有中断GPIO的get和put,我们这边对这2个函数没有实现,我猜想get函数是对中断GPIO的配置,put是对中断GPIO的free,拙见而已,
这里首先是对mma_845x器件身份的识别,来看下IdentifyChipset函数
读i2c bus上面mma传感器的WHO_AM_I 寄存器,来判断连上的是哪个device
这里首先是对芯片层的一些赋值,找到这里我们注册的是哪款芯片,然后把i2c client,chip id, chiptype等信息赋值给这里的局部变量,然后再把局部变量赋值给全局的几个指针,然后再试对芯片寄存器设置一些默认值。
然后是初始化芯片的事件类型,这里这块芯片分很多事件类型,有撞击事件,横竖切换事件等,接下来如果pChip结构体中Init成员函数非空的话就执行这个函数。
接下来注册了一个字符类型的驱动,咱来看看这个驱动是干啥用的,最主要的还是看mma_fops这个文件操作结构体中实现了哪些个东西,mma_char.c
这里有打开关闭,读,还有ioctl功能,
首先是open函数,这里还要先看下pContext_t这个结构体
里面有3个成员变量,乍看之下还不清楚是用来干嘛的,先不管,接着往下看就明白了,回到open函数中,首先把文件结构体中的数据给这个结构体,然后判断,这里的意思应该是如果open函数被打开了一次那么就会执行if中的代码,如果已经被打开了,那么就直接返回零,if语句中也就是多结构体的初始化,还有初始化了一个信号量,然后把p指针传给file->private,代表已经被打开了,非空。
release中的代码就不多说了,跟open函数正好相反。
然后是比较重要的ioctl和read function
这个ioctl函数很简单,通过switch case语句,把用户传进去的参数分类,然后做出不同的动作,其中有对threshold的设置,读取,对acclerometer_flag的设置和获取等动作。
这个函数看上去很复杂,其实就做了一件事情,调用copy_to_user把数据传到用户空间,其实这里我很不明白这个字符驱动到底跟我们的mma器件有什么关系,因为这里read函数中我没有看到一点关于i2cread 的内容,所以我觉得,这里这个字符驱动是多余的,不过这里对等待队列的读操作有待学习。
我们也可以自己再这里加上对I2C的读操作来把这里的read函数挂到用户空间,我想这里的ioctl函数应该是来设置threshold的,应该是用在HAL层中来被设置的。
而这里的read函数也可以当做poll模式下来读取xyz的数据,大家可以看到在read中有作比较,当读回来的数据大于threshold时才把数据copy到用户空间。
OK,这个字符驱动暂时介绍到这边,下面我们接着看mma_core.c中的probe函数
这里是一些列的初始化,input sybsystem、文件系统、信号量、定时器、线程的初始化,先看输入子系统初始化过程
分别调用input_allocate_device和input_register_device函数来注册input 驱动,然后就是设置input 驱动的类型,下面还注册了一个输入设备这里我的理解是这样的,input1主要是输出xyz方向上的重力加速度分量,而input2主要是用来输出一些碰撞和震动,还有横竖切换等事件。
下面是初始化文件系统
这里代码很多,在mma_sysfs.c中,其实一点都不难,就是太多了有点复杂,看过内核驱动模型的同学应该很熟悉这里,这里就是建立了一个名为sensor的class,来作为这些文件的父类,具体的我不多说了,这里的文件太多了,也讲不完,可以一边参照data sheet一边看这里的文件时用来干嘛的,这里read/write 的时候就分别会回调这里相关的函数,然后去设置寄存器。大家可以看到下面就是这里建立的文件系统
/sys/class/sensor # ls -l
lrwxrwxrwx 1 root root 0 Jan 2 01:10 mma -> ../../devices/virtual/sensor/mma
lrwxrwxrwx 1 root root 0 Jan 2 01:10 motion_detection0 -> ../../devices/virtual/sensor/mma/motion_detection0
lrwxrwxrwx 1 root root 0 Jan 2 01:10 orientation_detection0 -> ../../devices/virtual/sensor/mma/orientation_detection0
lrwxrwxrwx 1 root root 0 Jan 2 01:10 tap_detection0 -> ../../devices/virtual/sensor/mma/tap_detection0
lrwxrwxrwx 1 root root 0 Jan 2 01:10 transient_detection0 -> ../../devices/virtual/sensor/mma/transient_detection0
/sys/class/sensor #
然后是初始化信号量和定时器,这里就不多说了。
接下来是创建了一个线程并执行他,这个线程是一个死循环,也就是我们这里最关键的一个函数,之后再说。
然后这里是申请中断,如果我们使用中断模式的话就申请中断,如果没有使用中断模式的话这里有一个flag,poll_mode被设置成1,初始化的时候是0.
porbe函数就先讲到这里,这里主要还是做了一些初始化的东西,下面来分析一下这个驱动是如何工作的,其实相关的就是这里最重要的2个东西,一个是定时器,还有一个是这个thread的处理,我们下面接着看
首先看下这里的中断响应函数和定时器响应函数,这里基本啥也没做,就是释放信号量,关键就在这,我们接着看
看下我们的线程,一开始是初始化了一堆变量,然后把data转化为我们这里的一个ChipInfo_t结构体指针,然后初始化等待队列,然后是修改定时器下次定时到达时间为1秒钟,然后是一个while循环,看下这个循环中到底做了啥事情。
首先是一个do while来试图获取信号量,这里信号量被初始化为0,所以这边是得不到的,就会一直等在这边,前面我们看过定时器和中断函数中都做了对信号量的释放动作,联想到这边就是说,我们的线程不是一直在走的,只有当发生定时器时间到达和中断发生了,才会让我们这里的线程继续往下走,也就实现了这里的polling和interrupt 这2中模式。
这个线程下面的代码我们都能猜到,就是通过I2C读取芯片中的数据,然后利用input子系统push到用户空间,如果是polling mode的话就修改下次定时到达的时间,这里的设计还是满巧妙的,有待学习,特别是我觉得代码写的比较规范。
下面来一张图来分析这里的处理流程。
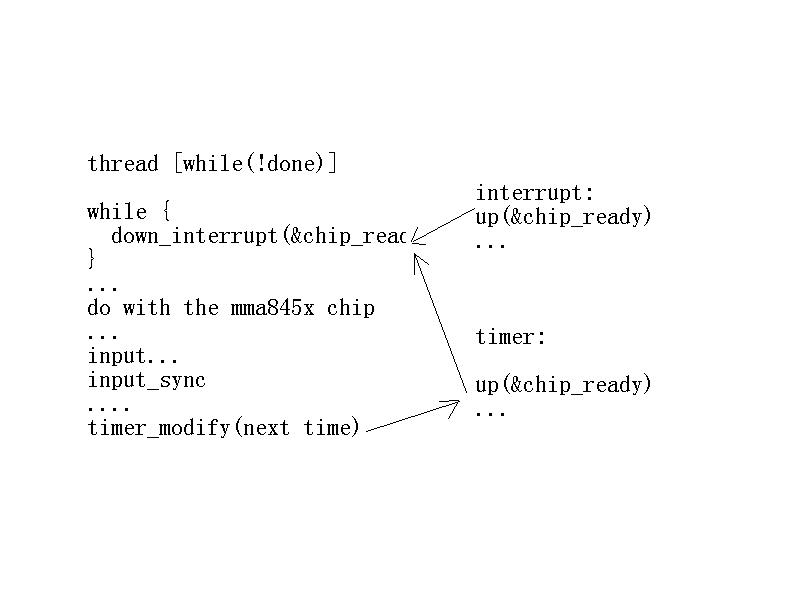
画的太丑了,见谅!!
分享到:




相关推荐
Arduino 三轴加速度传感器采用Freescale(飞思卡尔)公司生产性价比高微型电容 式加速度传感器MMA7260 芯片。其采用了信号调理、单级低通滤波器和温度补偿技 术,并且提供了4 个灵敏度量程选择的接口和休眠模式接口...
freescale加速度传感器 详细资料
本无线采集系统采用了Freescale公司最新推出的一款低成本、单芯片、三轴加速度传感器MMA7260。该微型电容式加速传感器融合了信号调理、单极低通滤波器和温度补偿技术,并提供了4种加速度测量范围,分别为1.5 g、2 g...
FreeScale 3D G Sensor MMA8452 linux下驱动,参考代码 及相关datasheet。
用c8051f411单片机控制freescale MMA7260测量加速度并做AD,然后通过spi总线控制CC2500发射出去
飞思卡尔半导体(Freescale Semiconductor)目前正通过引入高敏感度的XYZ三轴加速计,满足当今智能移动设备领域日益增长的移动感应需求。 从MP3播放器到PDA,再到超小的笔记本电脑,当今的消费者正在越来越多地...
MMA7360是freescale公司的加速度传感器芯片,可以检测三个方向的加速度,转换为电压信号。
MMA7455 加速度传感器 C51 程序 LCD1602 + 串口 Freescale
3-Axis Digital Accelerometer 是方向检测,手势检测和运动检测等...这款 3-Axis Digital Accelerometer(±1.5g) 基于 Freescale 的低功耗模块 MMA7660FC。它具有高达 10,000g 的高冲击耐受性和可配置的每秒采样率。
freescale智能小车竞赛 驱动板PCB
网上收集的飞思卡尔三轴加速度资料MMA7260和MMA74-Internet to collect information on Freescale' s three-axis acceleration and MMA7455 MMA7260
uboot下网卡驱动的分解,基于飞思卡尔平台,包含linux下的网卡设备抽象以及注册过程
是android的freescale的驱动设备,调试工具
freescale MC1321X 系列介绍freescale MC1321X 系列介绍
ZSTAR3中主要的器件包括三轴模拟加速度计MMA7361L, 三轴数字加速度计MMA745xL和系统级封装(SiP) MC13213.本文介绍了ZSTAR3无线传感器参考设计主要元件的主要特性, 传感器板方框图以及采用模拟传感器与数字传感器的...
moto freescale DSP程序,用于无位置传感器的开发
LIS3DH驱动,飞思卡尔KL16平台,M0内核
Freescale 飞思卡尔 同步电机完美驱动方案
最新版freescale 三合一烧录器驱动和中文说明